资讯
谷歌旗下的 DeepMind 机器人团队公布了三项新进展,称这将帮助机器人在实验室外做出更快、更好、更安全的决策。其中一个包括一个通过“机器人守则”收集训练数据的系统,以确保你的机器人办公室助理可以为你取更多的打印纸,但不会攻击碰巧挡道的人类同事。

谷歌的数据收集系统 AutoRT 可以使用视觉语言模型 (VLM) 和大型语言模型 (LLM) 协同工作来了解其环境,适应不熟悉的长井,并决定适当的任务。 《机器人守则》的灵感源自阿西莫夫的《机器人三定律》,它被描述为一套“以安全为中心的提示”,指导操控机器人的 AI 避免选择涉及人类、动物、尖锐物体甚至电器的任务。
为了提高安全性,DeepMind 对机器人进行了编程,如果其关节上的力超过一定阈值,就会自动停止。机器人包含一个实体的终止开关,人类操作员可以使用它来立即关闭机器人。在七个月的时间里,谷歌在四栋不同的办公楼中部署了由 53 台 AutoRT 机器人组成的车队,并进行了 77,000 多次试验。一些机器人由人类操作员远程控制,而另一些机器人则根据脚本或使用谷歌的机器人变压器(RT-2)AI 学习模型完全自主地操作。
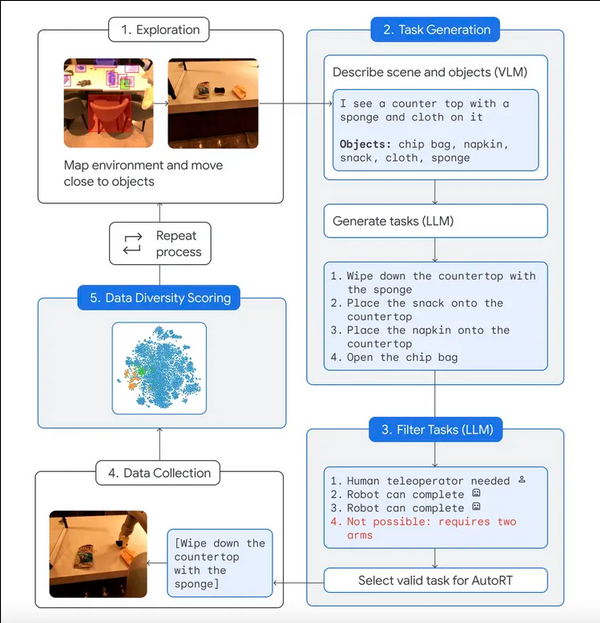
试验中使用的机器人以实用性为主,只配备了摄像头、机械臂和移动底座。 “对于每个机器人,系统都使用 VLM (AI视觉语言模组)来了解其环境和视线内的物体。接下来,LLM (AI大型语言模组)会建议机器人可以执行的一系列创造性任务,例如“将零食放在台面上”,并扮演决策者的角色,为机器人选择合适的任务来执行。











文明上网,理性发言,共同做网络文明传播者