资讯
近日消息,美国国家航空航天局(NASA)正着手研发首个创新性月球表面轨道交通方案,旨在为月球基地的物资与设备运输带来前所未有的稳定、自动化及高效能。这项前沿技术的引入,预示着在月球探索与资源开发利用领域的一次重大飞跃。
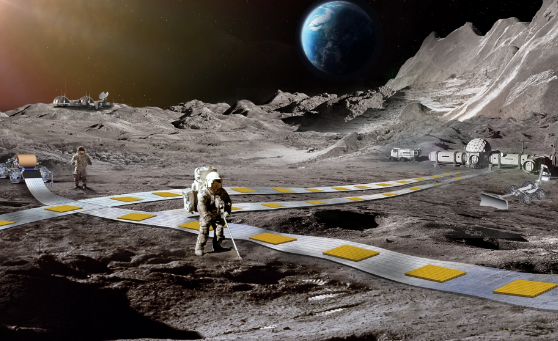
NASA 将之称为柔性悬浮轨道(FLOAT、Flexible Levitation on a Track),该铁路系统可以在 21 世纪 30 年代早期支持一个可持续月球基地的日常运营,该项目处于概念阶段,将在接下来的两年中继续研发关键技术和解决预算问题。
FLOAT 系统使用无动力的磁悬浮机器人,这些机器人在一条三层柔性薄膜轨道上悬浮:石墨层使机器人能够通过反磁悬浮(diamagnetic levitation)在轨道上被动漂浮;柔性电路层产生电磁推力,以可控方式推动机器人沿轨道移动;一个可选的薄膜太阳能板层在日光下为底座提供电力。
与带有轮子、腿或轨道的月球机器人不同,FLOAT 机器人没有活动部件,并在轨道上悬浮,以最大限度地减少月球灰尘的磨损。
与传统道路、铁路或缆车不同,FLOAT 轨道直接铺设在月球表面,避免了大规模的现场建设。单个 FLOAT 机器人能够以足够的速度(大于 0.5 米 / 秒)运输不同形状 / 大小的有效载荷(大于 30 公斤 / 平方米),而大规模的 FLOAT 系统将能够每天移动多达 10 万公斤的月壤 / 有效载荷数公里(regolith / payload multiple kilometers)。
FLOAT 将在尘土飞扬、不适宜居住的月球环境中自主运行,只需最少的现场准备,其轨道网络可以随着时间的推移被重新配置,以满足不断发展的月球基地任务需求。










文明上网,理性发言,共同做网络文明传播者